Reshape Possibilities
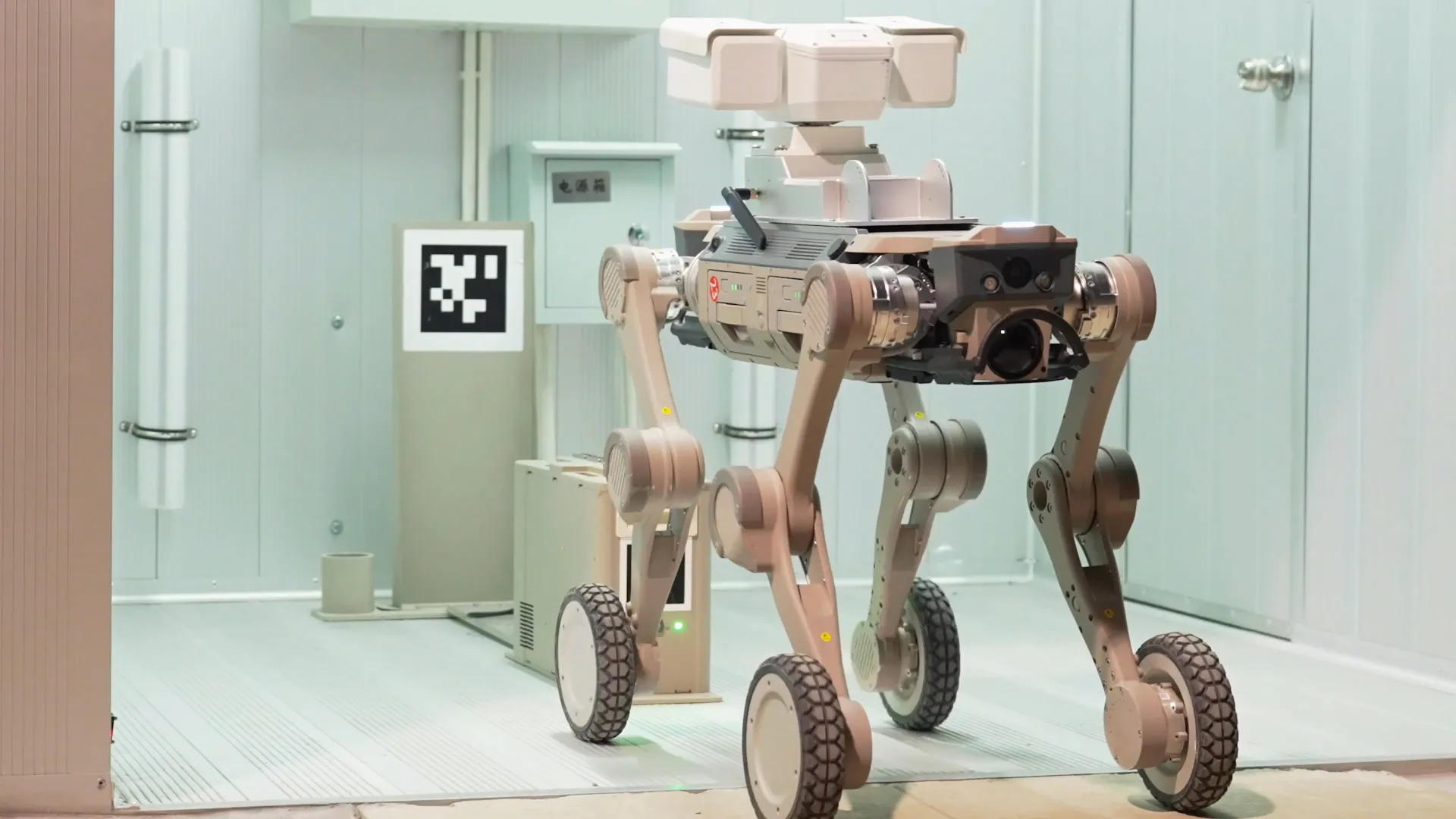
Genisom M1
The industry's first lightweight, high-load, fully protected quadruped robot
Genisom M1
The industry's first quadruped robot with a load-to-self-weight ratio close to 1:1






New Generation Performance Beast
All-around robustness, enabling a lighter body to carry more possibilities
Industry's First 1:1 Load-to-Self-Weight Ratio
Approximately 30kg total weight (lightest in its class), approximately 30kg continuous operational load, achieving nearly 1:1 load-to-weight ratio for the first time in the quadruped robot industry, truly realizing 'lightweight body + heavy-duty operation'.
Effortlessly Mastering Extremely Complex Scenarios
 80cm vertical obstacle height
80cm vertical obstacle height
 25cm steps continuous climbing
25cm steps continuous climbing
 Steep Slopes, Climb with Ease
Steep Slopes, Climb with Ease
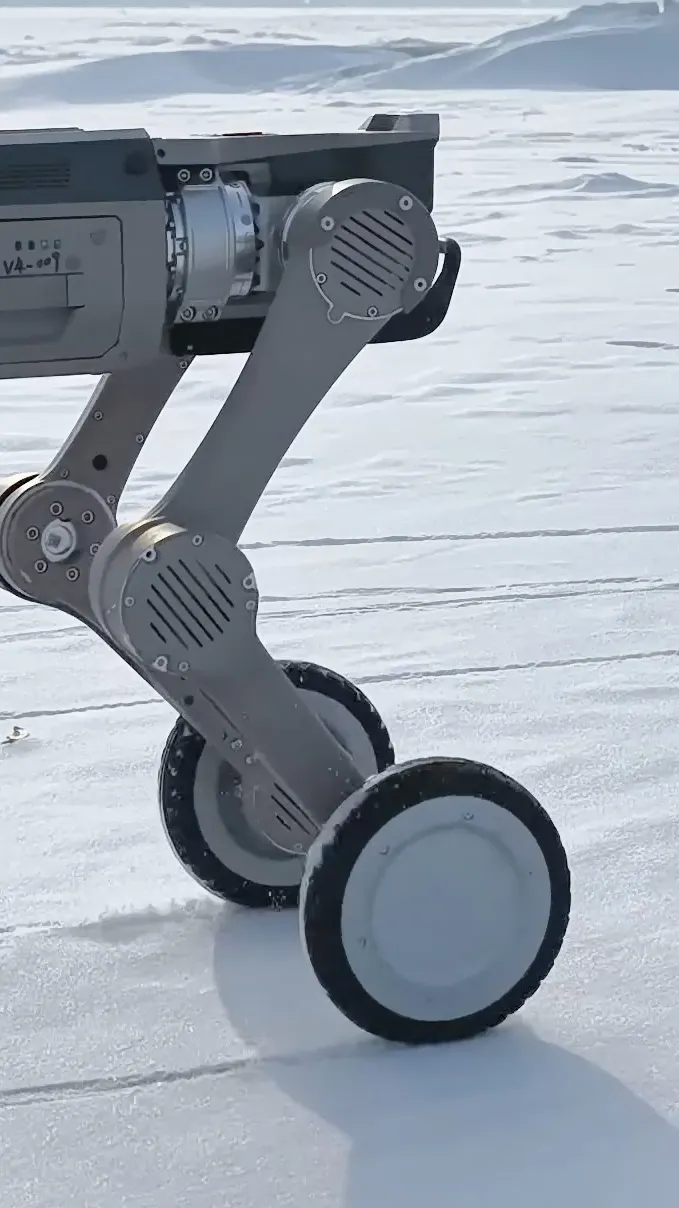
 Snow and Ice Scene Stable Passage
Snow and Ice Scene Stable Passage
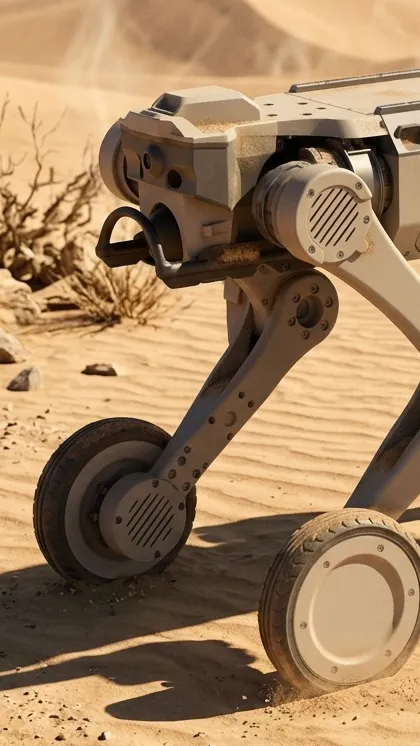
 Harsh Environment, Unobstructed Travel
Harsh Environment, Unobstructed Travel
 Obstacle Terrain, Easy Passage
Obstacle Terrain, Easy Passage
“Amphibious” Ultra-Strong Protection
Proven through actual testing and verification
IP67 Industrial-grade Protection
Integrated sealed design, resistant to water and dust intrusion, adaptable to harsh industrial environments such as heavy rain and dust.
Fearless

Extreme Environment

Wide Temperature Range Operation, Unfazed by Extreme Heat and Cold
-20°C ~ 55°C operating temperature, optional -40°C ~ 80°C wide-temperature battery version, covering extreme cold to high-temperature industrial sites.

Long-endurance navigation, continuous operation
Possesses industry-level, round-the-clock continuous operation capability
Non-Stop Mission, Uninterrupted Work
Dual battery quick-swap design, with a maximum no-load endurance of 5 hours / 29km, reducing downtime for waiting, making long-distance inspections and continuous operations more effortless.
Automatic Recharging All-Weather Autonomous Operation
Optional smart charging station supports low-battery automatic return for recharging, enhancing long-term unmanned operation capabilities. Reduces manual intervention, enabling 24/7 continuous operation all day long.
Open Platform, Unlimited Expansion
Multi-dimensional expansion, freely customizable scenarios

All-Terrain Autonomous Passage, Making a Name in One Battle
At the 2026 Beijing Yizhuang Robot Warrior Challenge, the Bronze Hammer M1 Autonomous Navigation Project was the only one to complete the entire course, and won first place in the four-legged robot category for autonomous navigation, first in number of awards, first in total score, and first in speed.
Break Free from Remote Control, Overcome All Obstacles
Fording obstacle cards: Under lateral water flow interference, successfully passing through steps covered with large rocks and cobblestones, verifying the operational capability for shallow water rescue after floods and mudslides.
Autonomous Navigation, Precise Passage
Pipeline crossing challenge: Overcoming the stability difficulties of moving on wet and slippery grass and curved pipe walls, demonstrating high-intensity inspection capability in narrow pipe galleries of chemical plants and power infrastructure.
Next application scenario, it is already in place in advance
 Forest Fire Prevention
Forest Fire Prevention
 Petrochemical Fire Protection
Petrochemical Fire Protection
 Power Inspection
Power Inspection
 Patrol the Park
Patrol the Park
 Logistics and Transportation
Logistics and Transportation
Cutting-edge Technology
Industry's First GULE Autonomous Following System
For the first time globally, a human completed a marathon with the assistance of an autonomous following robot: at the 2026 Beijing Yizhuang Half Marathon, the Tongma M1 served as the world's first autonomous following robot "pacemaker," completing the half-marathon pacing task. With a stable pace of 9 minutes per kilometer, it autonomously followed throughout, without remote control, successfully completing the 21-kilometer, 3-hour companion navigation mission.
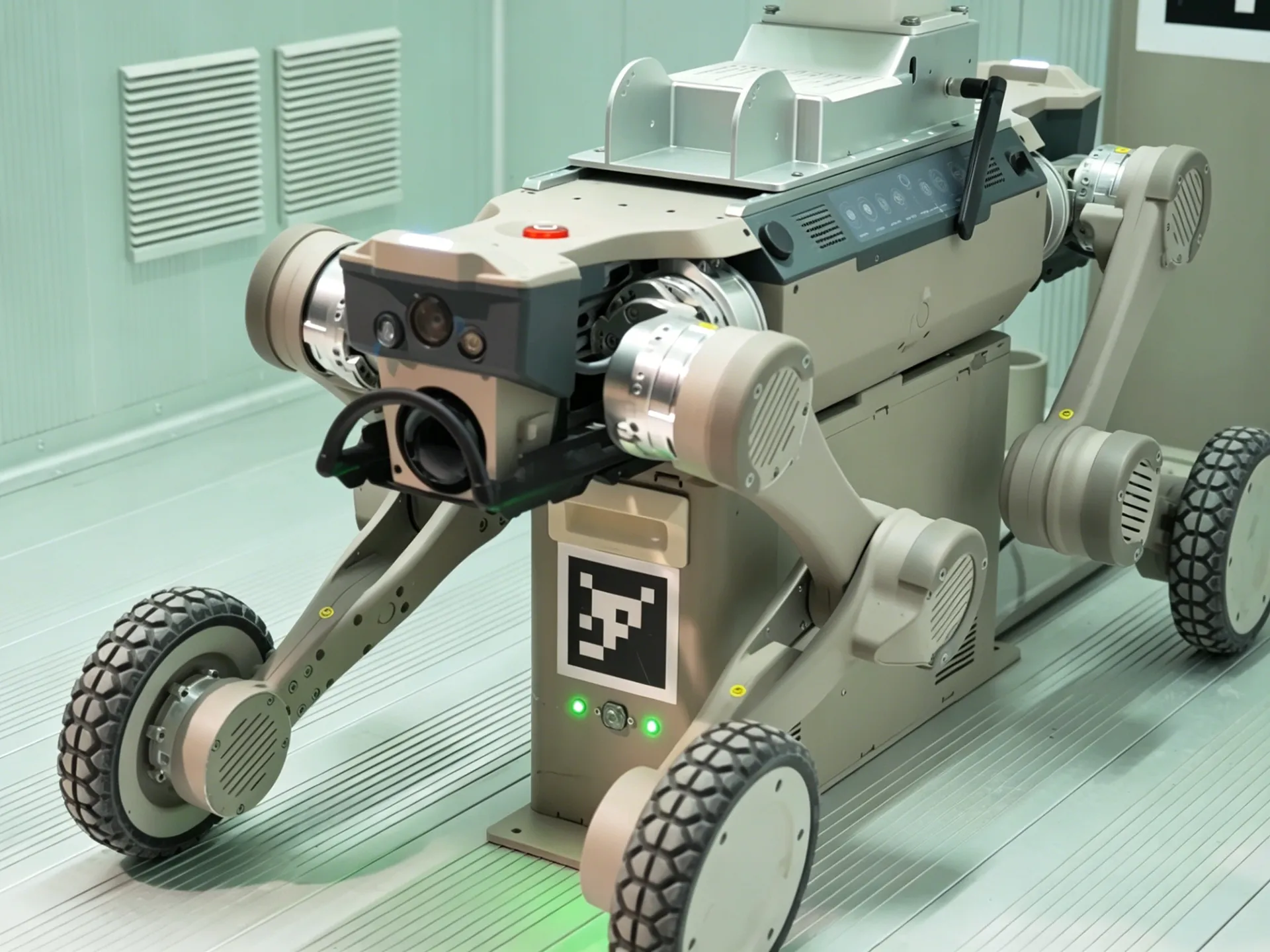
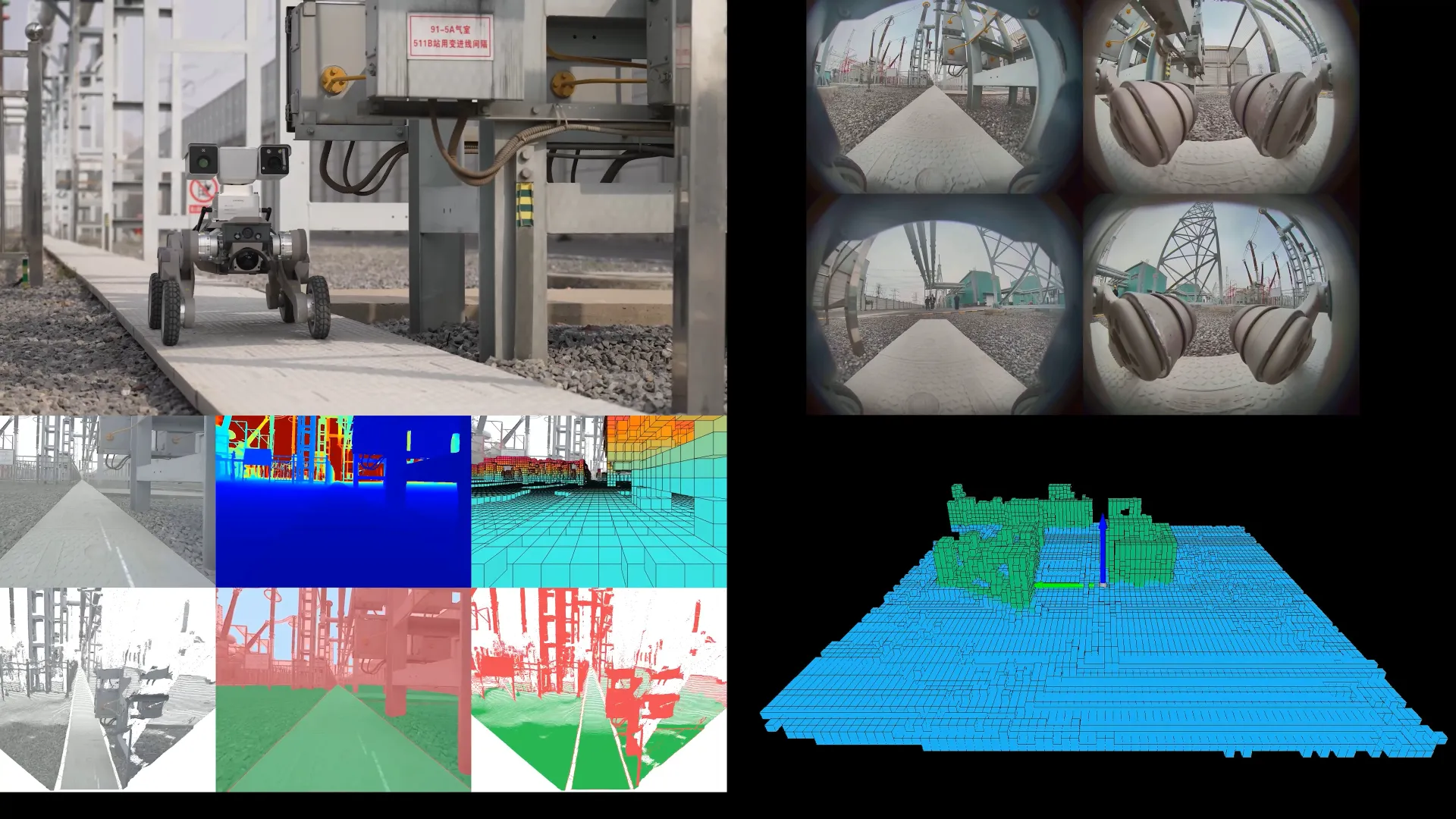
Learn MoreIndustry's First 720° 3D Surround Perception System
For the first time, the panoramic perception dimension of automotive autonomous driving is introduced into the field of ground mobile robots. Zhishen Technology's proprietary patented Omni-Panorama omnidirectional hybrid perception technology innovatively integrates fisheye surround view, AI real-time stitching and fusion algorithms, BEV-based temporal fusion algorithms, and OCC 3D spatial reconstruction capabilities into one system, breaking through the limitations of traditional robot perception and establishing a perception closed loop for continuous and precise interaction with the physical world, laying the core foundation for the next generation of embodied intelligence.
Learn MoreNotes
 Notes
Notes(1) The charging time data is measured at a standard ambient temperature of 25°C;
(2) The range data is measured at a speed of 1m/s under no-load conditions;
(3) For instructions on using the function expansion interface, please refer to the expansion manual;
(4) For detailed warranty terms, please refer to the product warranty manual;
(5) The above parameters are laboratory test data; actual performance may vary due to factors such as usage environment and operation methods. Please refer to the actual situation.
